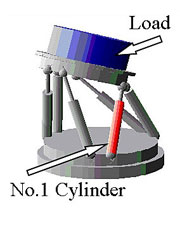
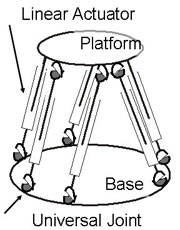
Paralell Manipulators driven by hydraulic systems is used as a motion base. Effectiveness of a Robust control scheme is investigated.