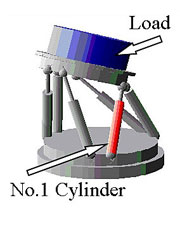
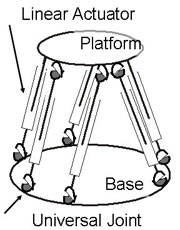
パラレルリンクの高剛性などの特長を生かして、油圧パラレルマニピュレータが工作機械、シミュレータ、ハプティクスなどに広く用いられているが、ロバスト制御の検討は十分ではない.ここでは、ロバスト制御手法の適用について検討している.